AR Series Drivers de Servomotor de Curto Alcance (Entrada CA)

Drivers de Servomotor de Curto Alcance série AR (Entrada CA)
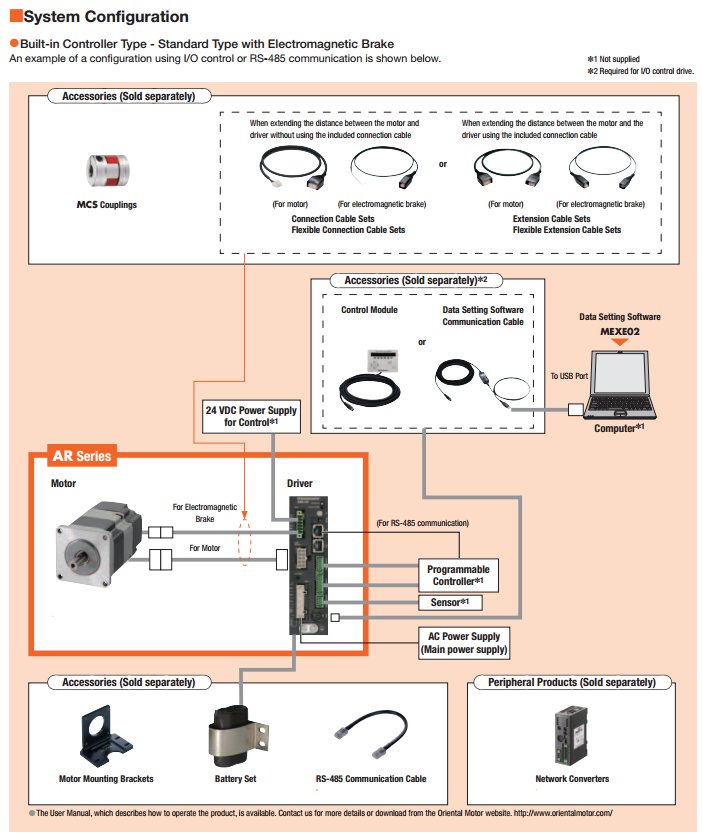
Os drivers ARD (entrada CA) oferecem desempenho superior de alta velocidade, baixa vibração e controle de malha fechada. Disponível em um driver armazena dados (rede industrial) ordriver de entrada de pulso. Operação avançada e controle de funções é incluído através do nosso software MEXE02 (download gratuito). Os drivers ARD (entrada CA) podem executar operações de posicionamento rápido em uma curta distância sem a necessidade de ajuste, enquanto proporciona um desempenho suave.
- Funções de Proteção Embutidas
- Entrada de Pulso ou Driver Embutido (rede industrial)
- Entrada 100-120 ou 200-240 VCA monofásico ou 200-230 VCA trifásico
- Para uso com o motor da série AR (Entrada CA)
Linha de Produtos
Tipo |
Driver |
Tipo |
Potência de entrada |
|---|---|---|---|
Driver Embutido ( Armazena Dados) |
Circuito Fechado serie AR |
Monofásico 100-120 VCA |
|
Monofásico 200-240 VCA |
|||
Entrada de pulso |
Circuito Fechado serie AR |
Monofásico 100-115 VCA |
|
Monofásico 200-230 VCA |
|||
trifásico 200-230 VCA |


Entrada de pulso
Alta confiabilidade com o controle de ciclo fechado
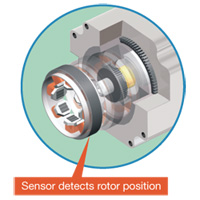
A série AR usa o controle de circuito fechado da Oriental Motor para manter a operação de posicionamento mesmo durante acelerações e flutuações bruscas de carga. O sensor de detecção da posição do rotor monitora a rotação. Quando uma condição de sobrecarga é detectada, a Série AR ganhará controle instantaneamente, usando o modo de ciclo fechado. Quando uma condição de sobrecarga permanece, a série AR realizará a saída de sinal sonoro, fornecendo, deste moto, a confiabilidade igual àquela de um servomotor.
Um único driver para dar suporte a uma variedade de motores
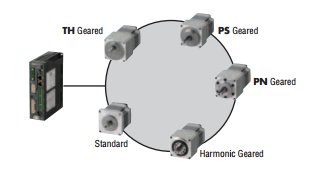
O driver é equipado com uma função de reconhecimento automático, a qual reconhece o motor acoplado. Vários tipos de motores, como o tipo padrão e o de redutor, podem ser acoplados a um único driver. Portanto, não há a necessidade de alterar o driver para combinar com o motor que é acoplado. A manutenção é mais fácil.
Atuadores equipados com a série AR
Todos os produtos equipados com a série AR apresentam a controlabilidade padronizada.

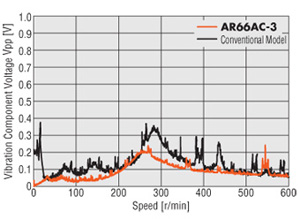
Baixa vibração
Além do sistema de acionamento de micropassos, a série AR também usa a função Smooth Drive para permitir um movimento mais regular. A função Smooth Drive implementa automaticamente o acionamento de micropassos baseado na mesma distância de percurso e velocidade usadas no modo completo, sem alterar as configurações de entrada de pulso.
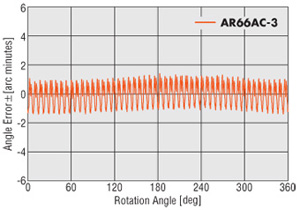
Precisão de ângulo melhorada
A série AR usa a tecnologia melhorada de controle de corrente para melhorar a precisão de posição de parada do motor de passo. O resultado é uma precisão de posição aumentada.
AR66AC-3: ±3 minutos de arco
Modeloo convencional: ±5 minutos de arco
Desempenho de um servomotor
A série AR mantém todos os benefícios de um motor de passo.
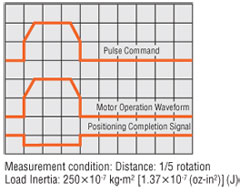
Alta Resposta
O motor de passo opera em sincronia com os comandos de pulso para atingir uma alta resposta. Não há demora na operação após um comando de pulso.
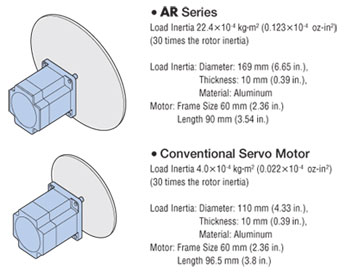
Capaz de conduzir grandes cargas de inércia
Comparado com um servomotor de mesmo tamanho, uma carga inercial maior pode ser conduzida, independentemente das condições de velocidade.
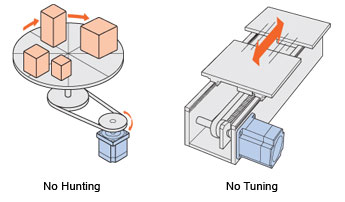
Sem Oscilação / Sem ajuste
Porque usa um motor de passo, a série AR não varia a velocidade quando interrompida. Portanto, a série AR é ideal para aplicações onde o equipamento usa um mecanismo de acionamento por correia ou, de outra maneira, tem baixa rigidez e não se deseja que vibre ao ser interrompido.
Com a série AR, é possível fazer o posicionamento rapidamente após uma mudança de carga etc., sem ajustar quaisquer ganhos.
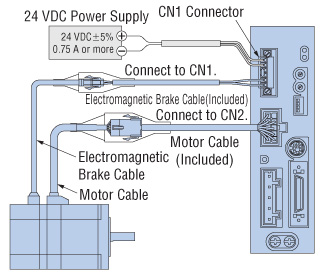
Freio eletromagnético com controle automático
Um circuito separado não é necessário para controlar o freio eletromagnético. O freio eletromagnético é liberado quando o motor é excitado (= a entrada de corrente ON é ligada) e ativada para manter a carga em posição quando a excitação é cortada (= a entrada de corrente ON é desligada).
Principais normas de segurança
A Série AR é reconhecida pelos Padrões UL / CSA e tem a Marca CE como prova de conformidade com as Diretivas de Baixa Tensão e EMC.
Cumprimento com a Semiconductor Manufacturing Facility Padrão "SEMI F47"
A Série AR está em conformidade com o Padrão SEMI na queda de tensão da fonte de alimentação e, consequentemente, este motor pode ser usado efetivamente em aparelhos de fabricação de semicondutores. O cliente é aconselhado a avaliar sempre o motor de passo no equipamento real.
Separação da Potência Principal e Potência de Controle
Os terminais de entrada de alimentação de controle são fornecidos separadamente dos terminais de alimentação principal. Isto significa que mesmo quando a alimentação principal está cortada devido a uma paragem de emergência, etc., pode ainda detectar a posição actual e verificar as informações sobre cada alarme, etc., desde que a alimentação (24 VCC) seja fornecida ao controlo Terminais de entrada de energia.

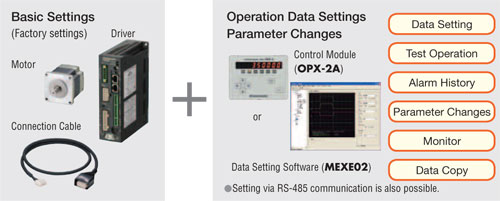
Funções estendidas
É possível combinar um módulo de controle (OPX-2A, vendido separadamente) oro software* de configuração de dados (MEXE02) para alterar os parâmetros, adicionar funções e realizar várias operações de monitoramento, de acordo com as necessidades do seu sistema.
- Ajustes da configuração de parâmetros
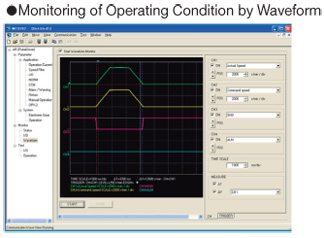
- Monitoramento
- Operação de retorno
- Operação de compressão
*Cabo para conexão ao PC necessário para o software de configuração de dados MEXE02 (vendido separadamente** - consulte Acessórios).
**Um cabo de comunicação CCD05IF-USB GRATUITO está disponível por cliente, entre em contato com o Suporte Técnico para mais informações.
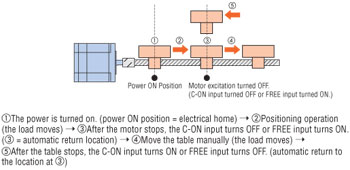
Operação de retorno
Duas funções de operação de retorno estão disponíveis: retorno à operação de posição inicial elétrica e operação de retorno automático. Com essas opções, é possível configurar facilmente seu sistema para retornar à posição inicial quando a fonte de energia principal foi desligada devido a uma parada de emergência etc., ora excitação do motor foi desligada.Enquanto a fonte de energia principal estiver desligada, a energia de controle (24 VCC) deve ser fornecida para manter o posicionamento.
Operação Retornar-para-posição inicial elétrica
Operação na qual o motor retorna à “posição que ele havia assumido quando a energia foi ligada (= posição inicial elétrica)” oro “local configurado como a posição inicial elétrica”.
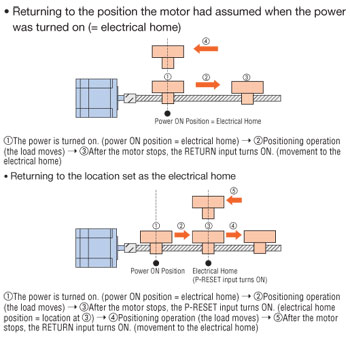
Operação de retorno automático
Operação na qual o motor retorna à “posição na qual a excitação do motor foi desligada (= a entrada C-ON foi desligada ora entrada FREE foi ligada)”.
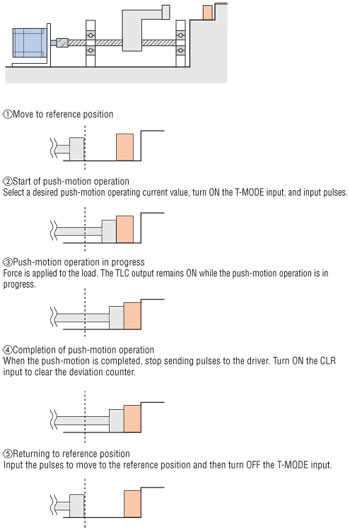
Operação de compressão
É possível gerar pulsos para realizar a operação de compressão onde a carga tem continuamente uma força aplicada a ela. A quantidade de força (torque de saída do motor) é ajustada pelo valor atual de operação de compressão. Usando um módulo de controle (OPX-2A) orsoftware de configuração de dados (MEXE02), ambos vendidos separadamente, mude o parâmetro aplicável para “Operação de compressão”, ligue a entrada T-MODE e envie os pulsos. O motor começará a operação de compressão.
Driver de dados armazenados (vermelho), com controlador acoplado
Driver (de dados armazenados), com controlador acoplado
Um gerador de pulsos acoplado permite que o motor seja conduzido pela conexão a um PLC oroutros dispositivos com conexão através de uma rede de Automação de Fábrica (FA) por meio de um controle de I/O. O controle Modbus (RTU) orum conversor de rede.
A sobrecarga no PLC programável é reduzida, pois as informações necessárias para as operações do motor estão acopladas no driver. Isso simplifica a configuração do sistema para controle de vários eixos. Definido pelo módulo de controle (vendido separadamente), software de configuração de dados orcomunicação RS-485.
Equipado com uma interface que se conecta a vários sistemas de controle mestre
FLEX é o nome genérico dos produtos usados para o controle de rede de Automação de Fábrica (FA) por meio do controle de I/O, controle de Modbus (RTU) orconversor de rede.
Os produtos FLEX permitem conexão e controle fáceis, e reduzem a complexidade de configuração do sistema.
Tipo de operação
Com pacotes de controlador acoplado, a velocidade de operação do motor e a distância de percurso são configuradas com dados operacionais, e as operações realizadas são baseadas nos dados operacionais selecionados. O tipo de operação é o padrão quádruplo.
Produto |
Conteúdo |
||
Comum |
Método de controle |
Controle de I/O |
|
Comunicação RS-485 |
Conexão do conversor vermelho |
||
Conexão do protocolo do Modbus (RTU) |
|||
Entrada do comando de posição |
Configurado com o número de dados operacionais Intervalo de comando por ponto: -8388608~8388607 [passos] (unidade de configuração: 1 [passo]) |
||
Entrada do comando de velocidade |
Configurado com o número de dados operacionais Intervalo de comando: 0 ~ 1000000 [Hz] (unidade de configuração: 1 [Hz]) |
||
Entrada do comando de aceleração/desaceleração |
Configurado com o número de dados de operação orparâmetros.A taxa de aceleração/desaceleração [ms/kHz] oro tempo de aceleração/desaceleração [s] podem ser selecionados. Intervalo de comando: 0,001 ~ 1000,000 [ms/kHz] (unidade de configuração: 0,01 [ms/kHz])0,001 ~ 1000,000 [s] (unidade de configuração: 0,001 [s]) |
||
Controle de aceleração/desaceleração |
Filtro de velocidade, filtro médio de movimento |
||
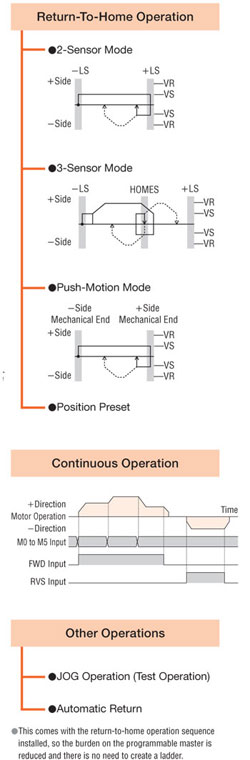
Operação Retornar-para-posição inicial |
Método Retornar-para-posição inicial |
Modo de 2 sensores |
Esta é a operação Retornar-para-posição inicial usando os sensores de limite (+LS, -LS). |
Modo de 3 sensores |
This is the return-to-home operation using limit sensors e HOME sensor. |
||
Modo de compressão*1 |
Esta é a operação Retornar-para-posição inicial usando os sensores de limite e de posição inicial. |
||
Pré-configuração de posição |
Esta função permite que uma posição inicial seja confirmada através da entrada P-PRESET usando uma posição arbitrária. |
||
Um valor arbitrário pode ser estabelecido para a posição inicial. |
|||
Operação de posicionamento |
Número de pontos de posicionamento |
64 pontos (nº 0 ~ 63) |
|
Modo de operação |
Modo incremental (Posicionamento relativo) |
||
Modo absoluto (Posicionamento absoluto) |
|||
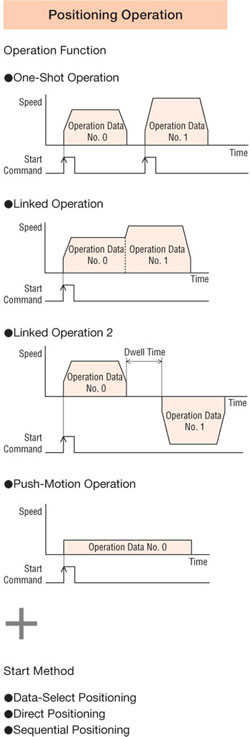
Funções de operação |
Operação de via única |
Esta é uma operação de posicionamento do tipo PTP (Ponto a Ponto). |
|
Operação vinculada |
Esta é uma operação de posicionamento de troca de velocidade de vários passos, vinculada aos dados operacionais. |
||
Operação vinculada 2 |
Esta é uma operação de posicionamento com temporizador vinculado aos dados operacionais.O temporizador (tempo ocioso) pode ser ajustado no intervalo de 0 ~ 50,000 [s].(Unidade de configuração: 0,001 [s]) |
||
Operação de compressão*1 |
Operações de posição de pressurização contínua são realizadas com respeito à carga. A velocidade operacional é máxima a 30 r/m, com o eixo do motor. |
||
Métodos de inicialização |
Modo de seleção de dados operacionais |
A operação de posicionamento começa quando INICIAR é introduzido depois que M0 ~M5 tiver sido selecionado. |
|
Modo direto (posicionamento direto) |
A operação de posicionamento começa com o número de dados operacionais que foi estabelecido com os parâmetros, quando MS0 ~MS5 foi introduzido. |
||
Modo direto (posicionamento direto) |
A operação de posicionamento começa na ordem, a partir do número 0 de dados operacionais cada vez que SSTART é introduzido. |
||
Operação contínua |
Número de pontos de velocidade |
64 pontos (nº 0 ~ 63) |
|
Método de mudança de velocidade |
Ele muda o número de dados operacionais. |
||
Outras operações |
Operação JOG |
+JOG or-JOG é introduzido e a alimentação regular é realizada. |
|
Operação de retorno automático |
Retorna automaticamente para a posição de parada original, quando o motor ficordesalinhado devido a uma força externa durante a não-excitação. |
||
Modo de controle*2 |
O modo normal oro modo de controle atual podem ser selecionados. |
||
Backup absoluto |
O uso da bateria (acessório), torna o sistema absoluto. |
||
*1 Não execute operações de compressão com os tipos com redutor. Essa ação danificará o motor e a caixa de engrenagens.
*2 O uso do modo normal é recomendado, a menos que menor geração de calor e menor ruído sejam necessários.
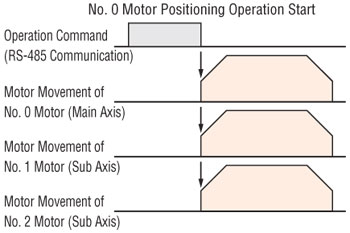
Função de envio de grupo (através da comunicação RS-485 orconversor vermelho)
Os grupos podem ser configurados com vários eixos conectados através da comunicação RS-485, e os comandos enviados a cada grupo. Operações de inicialização simultânea de vários eixos e idênticas também são possíveis.
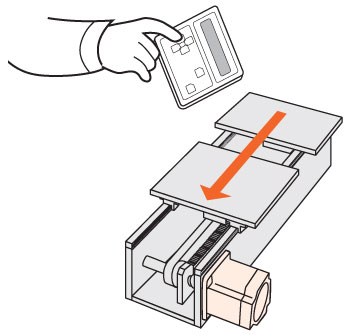
Função de ensino
A função de ensino pode ser realizada com o uso do módulo de controle OPX-2A (vendido separadamente) oro software de configuração de dados MEXE02. A mesa é movida para a posição desejada e os dados de posição neste momento são armazenados como dados de posicionamento.
Alta confiabilidade com o controle de ciclo fechado
A série AR usa o controle de circuito fechado da Oriental Motor para manter a operação de posicionamento mesmo durante acelerações e flutuações bruscas de carga. O sensor de detecção da posição do rotor monitora a rotação. Quando uma condição de sobrecarga é detectada, a Série AR ganhará controle instantaneamente, usando o modo de ciclo fechado. Quando uma condição de sobrecarga permanece, a série AR realizará a saída de sinal sonoro, fornecendo, deste moto, a confiabilidade igual àquela de um servomotor.
Um único driver para dar suporte a uma variedade de motores
O driver é equipado com uma função de reconhecimento automático, a qual reconhece o motor acoplado. Vários tipos de motores, como o tipo padrão e o de redutor, podem ser acoplados a um único driver. Portanto, não há a necessidade de alterar o driver para combinar com o motor que é acoplado. A manutenção é mais fácil.
Atuadores equipados com a série AR
Todos os produtos equipados com a série AR apresentam a controlabilidade padronizada.
Baixa vibração
Além do sistema de acionamento de micropassos, a série AR também usa a função Smooth Drive para permitir um movimento mais regular. A função Smooth Drive implementa automaticamente o acionamento de micropassos baseado na mesma distância de percurso e velocidade usadas no modo completo, sem alterar as configurações de entrada de pulso.
Precisão de ângulo melhorada
A série AR usa a tecnologia melhorada de controle de corrente para melhorar a precisão de posição de parada do motor de passo. O resultado é uma precisão de posição aumentada.
AR66AC-3: ±3 minutos de arco
Modeloo convencional: ±5 minutos de arco
Desempenho de um servomotor
A série AR mantém todos os benefícios de um motor de passo.
Alta Resposta
O motor de passo opera em sincronia com os comandos de pulso para atingir uma alta resposta. Não há demora na operação após um comando de pulso.
Capaz de conduzir grandes cargas de inércia
Comparado com um servomotor de mesmo tamanho, uma carga inercial maior pode ser conduzida, independentemente das condições de velocidade.
Sem Oscilação / Sem ajuste
Porque usa um motor de passo, a série AR não varia a velocidade quando interrompida. Portanto, a série AR é ideal para aplicações onde o equipamento usa um mecanismo de acionamento por correia ou, de outra maneira, tem baixa rigidez e não se deseja que vibre ao ser interrompido.
Com a série AR, é possível fazer o posicionamento rapidamente após uma mudança de carga etc., sem ajustar quaisquer ganhos.
Freio eletromagnético com controle automático
Um circuito separado não é necessário para controlar o freio eletromagnético. O freio eletromagnético é liberado quando o motor é excitado (= a entrada de corrente ON é ligada) e ativada para manter a carga em posição quando a excitação é cortada (= a entrada de corrente ON é desligada).
Principais normas de segurança
A Série AR é reconhecida pelos Padrões UL / CSA e tem a Marca CE como prova de conformidade com as Diretivas de Baixa Tensão e EMC.
Cumprimento com a Semiconductor Manufacturing Facility Padrão "SEMI F47"
A Série AR está em conformidade com o Padrão SEMI na queda de tensão da fonte de alimentação e, consequentemente, este motor pode ser usado efetivamente em aparelhos de fabricação de semicondutores. O cliente é aconselhado a avaliar sempre o motor de passo no equipamento real.
Separação da Potência Principal e Potência de Controle
Os terminais de entrada de alimentação de controle são fornecidos separadamente dos terminais de alimentação principal. Isto significa que mesmo quando a alimentação principal está cortada devido a uma paragem de emergência, etc., pode ainda detectar a posição actual e verificar as informações sobre cada alarme, etc., desde que a alimentação (24 VCC) seja fornecida ao controlo Terminais de entrada de energia.
Funções estendidas
É possível combinar um módulo de controle (OPX-2A, vendido separadamente) oro software* de configuração de dados (MEXE02) para alterar os parâmetros, adicionar funções e realizar várias operações de monitoramento, de acordo com as necessidades do seu sistema.
- Ajustes da configuração de parâmetros
- Monitoramento
- Operação de retorno
- Operação de compressão
*Cabo para conexão ao PC necessário para o software de configuração de dados MEXE02 (vendido separadamente** - consulte Acessórios).
**Um cabo de comunicação CCD05IF-USB GRATUITO está disponível por cliente, entre em contato com o Suporte Técnico para mais informações.
Operação de retorno
Duas funções de operação de retorno estão disponíveis: retorno à operação de posição inicial elétrica e operação de retorno automático. Com essas opções, é possível configurar facilmente seu sistema para retornar à posição inicial quando a fonte de energia principal foi desligada devido a uma parada de emergência etc., ora excitação do motor foi desligada.Enquanto a fonte de energia principal estiver desligada, a energia de controle (24 VCC) deve ser fornecida para manter o posicionamento.
Operação Retornar-para-posição inicial elétrica
Operação na qual o motor retorna à “posição que ele havia assumido quando a energia foi ligada (= posição inicial elétrica)” oro “local configurado como a posição inicial elétrica”.
Operação de retorno automático
Operação na qual o motor retorna à “posição na qual a excitação do motor foi desligada (= a entrada C-ON foi desligada ora entrada FREE foi ligada)”.
Operação de compressão
É possível gerar pulsos para realizar a operação de compressão onde a carga tem continuamente uma força aplicada a ela. A quantidade de força (torque de saída do motor) é ajustada pelo valor atual de operação de compressão. Usando um módulo de controle (OPX-2A) orsoftware de configuração de dados (MEXE02), ambos vendidos separadamente, mude o parâmetro aplicável para “Operação de compressão”, ligue a entrada T-MODE e envie os pulsos. O motor começará a operação de compressão.
Servomotor de Curto Alcance série AR

Servomotor de Curto Alcance série AR
A Série AR oferece alta eficiência, baixa vibração, operação contínua com a segurança do desempenho em malha fechada sem oscilação ou ajuste. Disponível com um controlador incorporado ordriver de entrada de pulso, o sistema reduz substancialmente a geração de calor do motor de passo através do uso de tecnologia de alta eficiência. A Série AR também consegue um consumo de energia até 40% menor, uma precisão de ângulo melhorada e é capaz de conduzir cargas de inércia grandes. Para uso com Drivers da Série AR.
- Operação Contínua de Alta Eficiência
- Desempenho em circuito fechado, sem oscilação ou ajuste
- Tipos de entrada CA ou CC
- Ampla gama de tipos de redução para a inércia validada e torque maior
- Freios eletromagnéticos
- Requer driver da série AR*
Gateways de Rede Industrial

O protocolo de comunicação do controlador mestre, rede Industrial, é convertido para o próprio protocolo de comunicação RS-485 da Oriental Motor. A conexão com os produtos compatíveis com a rede da Oriental Motor é completada com um cabo de comunicação RS-485.
- Compatibilidades de Rede: CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
* Para uso com drivers de tipo de dados armazenados (vermelho)
![]()
![]()
![]()
SCX11 Driver Universal

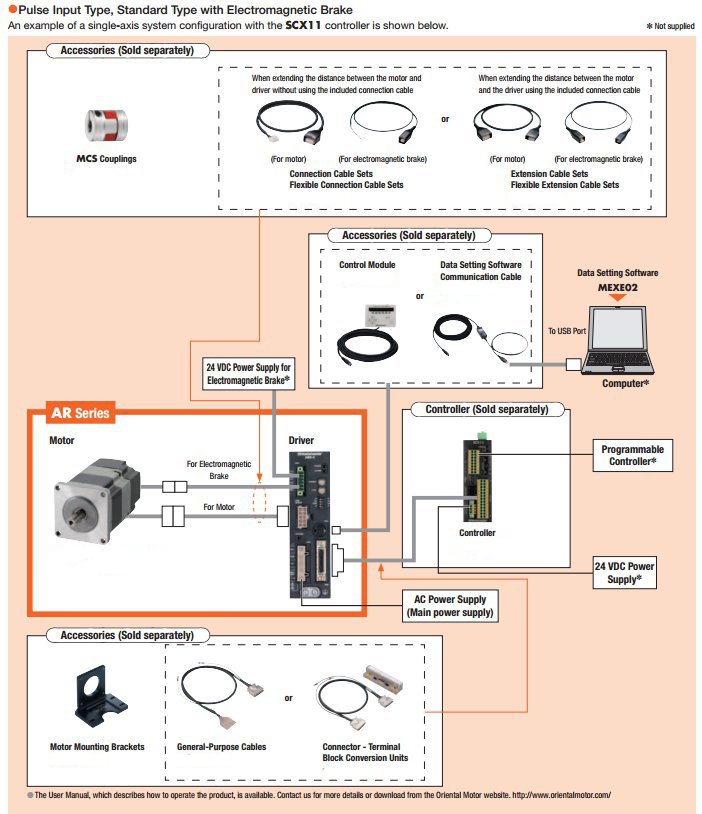
O SCX11 é um controlador altamente funcional e sofisticado, equipado com funções de edição e execução de programas. Use o SCX11 como um controlador que armazena programa para se conectar a qualquer um dos drivers de entrada de impulso padrão da Oriental Motor. O SCX11 também é capaz de controlar o motor através de comunicações seriais como USB, RS-232C e CANopen. Aceita entradas de encoder.
*For use with Entrada de pulso driver.
Opções de Controle - Módulo de Controle

Usar o módulo de controle opcional orsoftware de configuração de dados, é possível alterar os parâmetros, adicione funções e realize várias operações de monitoramento, de acordo com as necessidades do seu sistema. (Veja Funções Estendidas)
Opções de Controle - Software de Configuração de Dados

Este cabo de comunicação é necessário para conectar ao computador em que o software de configuração de dados está instalado.
*Um cabo de comunicação CCD05IF-USB GRATUITO está disponível por cliente, entre em contato com o Suporte Técnico para mais informações.
Conjunto de Baterias

Conecte ao driver quando usado como o sistema de backup absoluto.
*Para uso com o tipo de dados armazenados
Cabo de Comunicação RS-485

Este cabo é usado para ligar os drivers quando um tipo de controlador acoplado for usado de um modo de quedas múltiplas.
* Para uso com drivers de tipo de dados armazenados (vermelho).
Cabo do Driver

Cabo multi-Condutor de uso geral que é conveniente para conexão entre o driver eo controlador host.
*For use with Entrada de pulso driver.
Item |
Applicable Conector |
Comprimento |
CN5 (36 pinos) |
3.3 ft. (1 m) |
|
6.6 ft. (2 m) |
Configuração do sistema