DGII Series Circuito Fechado Atuador Giratório Vazado

Atuadores giratórios vazados da série DGII
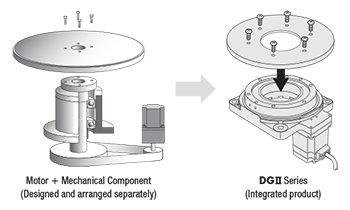
A série DGII é composta por uma linha de produtos que combina uma mesa giratória oca de alta rigidez com um motor de passo de circuito fechado e conjunto de acionador. Ela mantém a facilidade de uso de um motor de passo e, ao mesmo tempo, permite um posicionamento altamente preciso de cargas inerciais grandes.
- O atuador e o motor de passo integrados tornam o projeto mais fácil
- Mesa de saída oca de grande diâmetro
- O motor de passo oferece um desempenho excelente
- Tempo de resposta ágil
- Estabilidade a velocidades baixas
- Sem ajuste
- Acionadores de entrada de pulso ou com controlador acoplado (Rede)
- Entrada CA ou CC
Linha de produtos
Tamanho do quadro |
Tipo de driver |
Fonte de alimentação |
Opções |
Permissible |
Permissible Speed |
Permissible Moment Load |
||
60 mm (2.36 in.) Atuador Giratório |
24 VCC |
Single orDouble Shaft |
0.9 N·m |
7.9 lb-in |
200 rpm |
2 N·m |
17.7 lb-in |
|
85 mm (3.35 in.) |
100-115 VCA Monofásico |
Single orDouble Shaft |
2.8 N·m |
24 lb-in |
200 rpm |
10 N·m |
88 lb-in |
|
200-230 VCA Monofásico |
||||||||
200-230 VCA Trifásico |
||||||||
100-120 VCA Monofásico |
||||||||
200-240 VCA Monofásico |
||||||||
130 mm (5.12 in.) Atuador Giratório |
100-115 VCA Monofásico |
Single orDouble Shaft Freio eletromagnético |
12 N·m |
106 lb-in |
200 rpm |
50 N·m |
440 lb-in |
|
200-230 VCA Monofásico |
||||||||
200-230 VCA Trifásico |
||||||||
100-120 VCA Monofásico |
||||||||
200-240 VCA Monofásico |
||||||||
200 mm (7.87 in.) |
100-115 VCA Monofásico |
Single orDouble Shaft Freio eletromagnético |
50 N·m |
440 lb-in |
110 rpm |
100 N·m |
880 lb-in |
|
200-230 VCA Monofásico |
||||||||
200-230 VCA Trifásico |
||||||||
100-120 VCA Monofásico |
||||||||
200-240 VCA Monofásico |
||||||||




Precisão de posicionamento repetitivo de ±15 s
Perda de movimento ("lost motion") de 2 minutos de arco
Atuador Giratório Vazado

Alta precisão de posicionamento
- Sem folga
- Precisão de posicionamento repetitivo de ±15 s
- Perda de movimento (“lost motion”) de 2 minutos de arco
Observação: A precisão de posicionamento repetitivo é medida a uma temperatura constante (temperatura normal), sob uma carga constante.
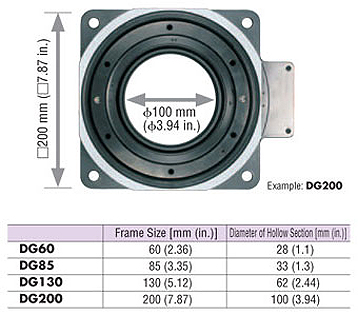
Uma mesa de grande diâmetro e saída oca simplifica a fiação e torna a tubulação possível
O orifício da concavidade de grande diâmetro (furo passante) ajuda a reduzir a complexidade da fiação e tubulação e, deste modo, simplifica o projeto do equipamento.
Contribui para um projeto mais fácil do equipamento
O mecanismo de redução de engrenagens emprega engrenagens de precisão juntamente com um mecanismo de ajuste exclusivo que elimina a folga. A precisão de posicionamento repetitivo de uma única direção é de ±15 s, enquanto que a perda de movimento em uma operação de posicionamento de duas direções é de 2 minutos de arco. Essas características tornam a série DGII a opção ideal para aplicações nas quais o posicionamento preciso é obrigatório.
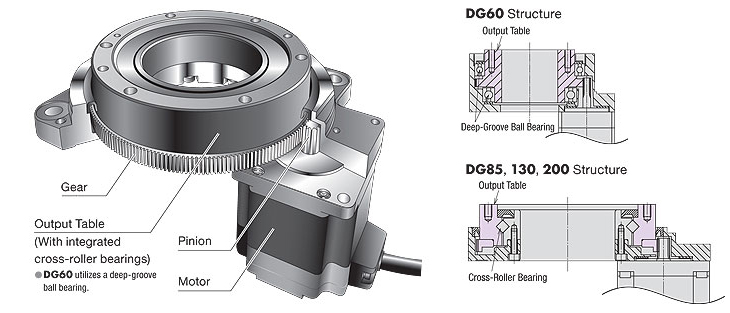
Força e rigidez elevadas
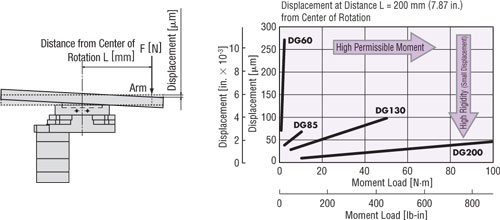
A mesa de saída oca é integrada com um mancal de rolo cruzado de alta rigidez*. A estrutura melhora a carga de propulsão admissível e a carga de momento, ao mesmo tempo que mantém um torque elevado.
*Com exceção da DG60
A mesa de saída usa mancais de esfera de ranhura profunda (duas peças) para o tipo de tamanho de estrutura de 60 mm (2,36 pol.), e um mancal de rolo cruzado para os tipos de tamanhos de estrutura de 85 mm (3,35 pol.), 130 mm (5,12 pol.) e 200 mm (7,87 pol.). Conforme o tamanho da estrutura aumenta, a carga de momento admissível também aumenta, mas o deslocamento causado pela carga de momento diminui.
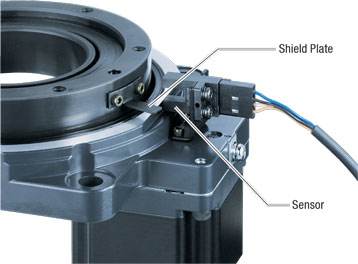
O “conjunto do sensor inicial” está disponível como acessório
Uma vez que o conjunto do sensor acompanha todas as peças necessárias para a operação Retornar-para-posição inicial, um tempo menor é gasto em projetar, fabricar e adquirir as peças relacionadas à instalação do sensor.
Exemplo de instalação do sensor DG130
Acoplamento direto para maior confiabilidade
Os braços e mesas do equipamento podem ser instalados diretamente na mesa de saída. Isto livra você do incômodo e do custo de projetar um mecanismo de instalação, providenciar as peças necessárias, ajustar a tensão da correia etc., quando as peças mecânicas, como correia e polia, são usadas para a instalação.
Alta confiabilidade aliada à alta eficiência dos motores da série AlphaStep AR
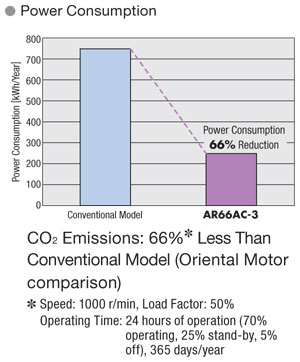
Alta eficiência e economia de energia
Um motor de passo de circuito fechado da série AlphaStep AR e um conjunto do acionador foram adotados como motor. Isto cria um produto mais eficiente e com economia de energia, em comparação com os modelos convencionais.
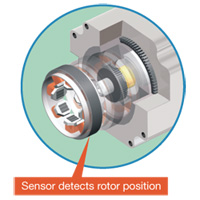
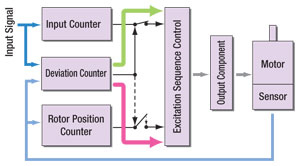
A série AR usa o controle de circuito fechado da Oriental Motor para manter a operação de posicionamento mesmo durante acelerações e flutuações bruscas de carga. O sensor de detecção da posição do rotor monitora a rotação. Quando uma condição de sobrecarga é detectada, a Série AR ganhará instantaneamente controle, usando o modo de ciclo fechado. Quando uma condição de sobrecarga permanece, a série AR realizará a saída de sinal sonoro, fornecendo, deste moto, a confiabilidade igual àquela de um servomotor.
Adoção de um sensor de detecção de posição do rotor (determinador)
Como o sensor é compacto e fino, o comprimento total do motor foi reduzido.
O desempenho de resistência ao calor e à vibração foi melhorado em relação aos encoderes ópticos regulares.
Devido ao fato de que um cabo de encoder não é necessário, o motor e acionador podem ser conectados com apenas um cabo.
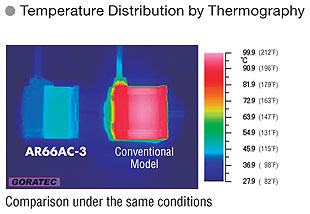
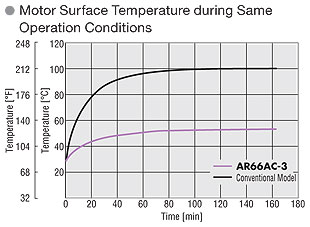
Geração de Calor Reduzida
A geração de calor pelo motor foi reduzida significativamente por meio de maior eficiência.
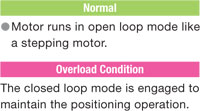
Continua a operar mesmo com uma flutuação de carga e aceleração repentinas
Opera de modo síncrono com comandos que usam o controle de circuito aberto durante condições normais. Em uma condição de sobrecarga, ele troca imediatamente para controle de circuito fechado para corrigir a posição.
Saída do sinal de alarme no caso de anormalidade
Se uma sobrecarga for aplicada continuamente, é enviado um sinal de alarme. Quando o posicionamento está completo, é enviado um sinal de END. Isto garante o mesmo nível de confiabilidade alcançado por um sistema de circuito fechado avançado ou um servomotor.
Consumo de energia: 66% menos* do que o modelo convencional
Acionador com controlador acoplado (Rede)
Tipo de controlador acoplado (dados armazenados)
Como o acionador possui as informações necessárias para a operação do atuador, a sobrecarga no PLC host é reduzida. A configuração do sistema ao usar controle de multieixos foi simplificada.
Os ajustes são configurados com o uso do módulo de controle (vendido separadamente), software de configuração de dados ou comunicação RS-485.
Como conectar o controlador acoplado (Dados armazenados)
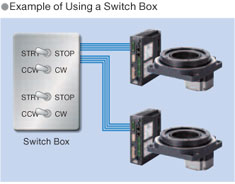
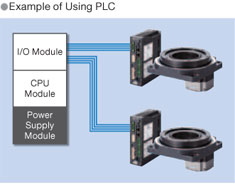
1. I/O
A função do módulo de posicionamento (geração de pulsos) é acoplada no acionador, permitindo que a operação use a I/O através da conexão direta a uma caixa de comutação ou PLC. Como não é necessário um módulo de posicionamento no PLC, ocorre economia de espaço e simplificação do sistema.
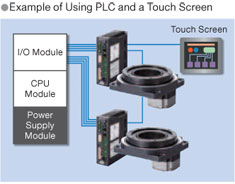
2. Modbus (RTU)/RS-485
Os dados e parâmetros operacionais podem ser ajustados e os comandos de operação podem ser inseridos pela comunicação RS-485. É possível conectar até 31 acionadores a cada módulo de comunicação em série. Há também uma função que permite a partida simultânea de vários eixos. O protocolo é compatível com Modbus (RTU), permitindo a conexão com dispositivos, tais como computadores com telas de toque e PCs.
3. Rede de Automação de Fábrica (FA)
O uso do conversor de rede (vendido separadamente) permite o suporte com a comunicação CC-link, MECHATROLINK ou EtherCAT. Os dados e parâmetros operacionais podem ser ajustados e os comandos de operação podem ser inseridos ao utilizar vários métodos de comunicação.
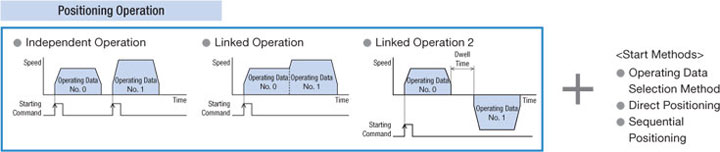
Tipo de operação
Com pacotes de controlador acoplado, a velocidade de operação do motor e a distância de percurso são configuradas com dados operacionais, e as operações realizadas são baseadas nos dados operacionais selecionados. O tipo de operação é o padrão quádruplo.
Item |
Conteúdo |
||
Common |
Método de controle |
Controle de I/O |
|
Comunicação RS-485 |
Conexão do conversor de rede |
||
Conexão do protocolo do Modbus (RTU) |
|||
Entrada do comando de posição |
Configurado com o número de dados operacionais Intervalo de comando por ponto: -8388608~8388607 [passos] (unidade de configuração: 1 [passo]) |
||
Entrada do comando de velocidade |
Configurado com o número de dados operacionais Intervalo de comando: 0 ~ 1000000 [Hz] (unidade de configuração: 1 [Hz]) |
||
Entrada do comando de aceleração/desaceleração |
Configurado com o número de dados de operação ou parâmetros. A taxa de aceleração/desaceleração [ms/kHz] ou o tempo de aceleração/desaceleração [s] podem ser selecionados. Intervalo de comando: 0,001 ~ 1000,000 [ms/kHz] (unidade de configuração: 0,01 [ms/kHz])0,001 ~ 1000,000 [s] (unidade de configuração: 0,001 [s]) |
||
Controle de aceleração/desaceleração |
Filtro de velocidade, filtro médio de movimento |
||
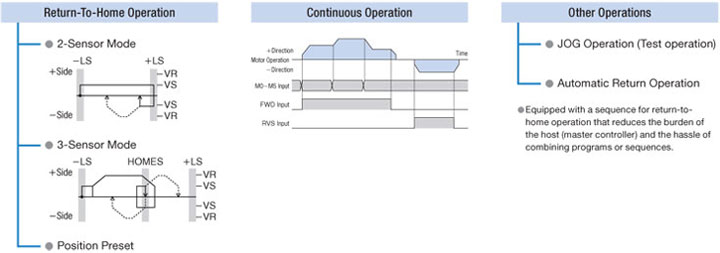
Operação Retornar-para-posição inicial |
Método Retornar-para-posição inicial |
Modo de 2 sensores |
Esta é a operação Retornar-para-posição inicial usando os sensores de limite (+LS, -LS). |
Modo de 3 sensores |
Esta é a operação Retornar-para-posição inicial usando os sensores de limite e de posição inicial. |
||
Modo de compressão*1 |
É a operação Retornar-para-posição inicial para a compressão para a extremidade mecânica de uma guia linear etc. |
||
Pré-configuração de posição |
Esta função permite que uma posição inicial seja confirmada através da entrada P-PRESET usando uma posição arbitrária. |
||
Um valor arbitrário pode ser estabelecido para a posição inicial. |
|||
Operação de posicionamento |
Número de pontos de posicionamento |
64 pontos (nº 0 ~ 63) |
|
Operation Mode |
Modo incremental (Posicionamento relativo) |
||
Modo absoluto (Posicionamento absoluto) |
|||
Modo de operação |
Operação de via única |
Esta é uma operação de posicionamento do tipo PTP (Ponto a Ponto). |
|
Operação vinculada |
Esta é uma operação de posicionamento de troca de velocidade de vários passos, vinculada aos dados operacionais. |
||
Operação vinculada 2 |
Esta é uma operação de posicionamento com temporizador vinculado aos dados operacionais.O temporizador (tempo ocioso) pode ser ajustado no intervalo de 0 ~ 50,000 [s].(Unidade de configuração: 0,001 [s]) |
||
Métodos de inicialização |
Modo de seleção de dados operacionais |
A operação de posicionamento começa quando INICIAR é introduzido depois que M0 ~M5 tiver sido selecionado. |
|
Modo direto (posicionamento direto) |
A operação de posicionamento começa com o número de dados operacionais que foi estabelecido com os parâmetros, quando MS0 ~MS5 foi introduzido. |
||
Modo sequencial (posicionamento sequencial) |
A operação de posicionamento começa na ordem, a partir do número 0 de dados operacionais cada vez que SSTART é introduzido. |
||
Operação contínua |
Número de pontos de velocidade |
64 pontos (nº 0 ~ 63) |
|
Speed-Change Method |
Ele muda o número de dados operacionais. |
||
Other Operations |
JOG Operation |
+JOG ou -JOG é introduzido e a alimentação regular é realizada. |
|
Automatic Operação de retorno |
Retorna automaticamente para a posição de parada original, quando o motor ficou desalinhado devido a uma força externa durante a não excitação. |
||
Modo de controle |
O modo normal ou o modo de controle atual podem ser selecionados. |
||
Backup absoluto |
O uso da bateria (acessório) torna o sistema absoluto. |
||
A operação de movimento de compressão não pode ser usada com este produto.
Função principal
Function |
Conteúdo |
Função de configuração de resolução do motor*1 |
A resolução do motor pode ser alterada pelo acionador sem o mecanismo de redução de velocidade operado mecanicamente.Uma configuração desejada pode ser feita de 100~10000 [P/R]. Como obter a resolução em um atuador |
Função de envio de grupo (através da comunicação RS-485 ou conversor de rede) |
Configurar um grupo de vários eixos conectados usando a comunicação RS-485 e enviar os comandos por grupo. Dar partida simultânea e iniciar a operação simultânea para vários eixos. |
Função de rotação |
Quando a posição de comando estiver fora do valor de configuração do parâmetro de “intervalo de configuração de rotação”, esta função retorna os dados de posição de comando e de rotação múltipla para 0. Uma vez que os dados de rotação múltipla também são retornados a 0, é possível desempenhar o controle de posição, mesmo para operações de rotação contínua, na mesma direção que usa o sistema de backup absoluto. *Ao desenvolver um sistema absoluto, a bateria como acessório (vendida separadamente) é necessária. |
Sobrecurso de hardware |
Esta função para o atuador quando o limite mecânico for excedido. |
Sobrecurso de software |
Esta função para o atuador quando limite estabelecido pelo software é excedido. Dependendo da configuração, um alarme também pode ser produzido sem parada. |
Entrada de PARADA (Parada externa) |
Esta função para forçosamente a operação quando há uma anormalidade ou outro problema. Selecione a parada instantânea, parada de desaceleração ou desligamento de todas as bobinas (a força de retenção do atuador é desligada) como método de parada. |
Saída de código do alarme |
Códigos de saída de alarme que estejam ocorrendo. |
Histórico de alarmes |
Mesmo se a energia é desligada, até 10 alarmes que tenham ocorrido podem ser armazenados. Isto pode ser usado para a solução de problemas. |
Filtro de velocidade |
É usado para fazer ajustes quando uma partida/parada suave ou movimento suave a uma operação de velocidade baixa são necessários. Mesmo para mudanças bruscas de comando de operação, esta função controla as alterações de velocidade do atuador para prevenir que se tornem muito grandes. |
Função de ensino*1 |
A carga é movida para a posição desejada e os dados de posição neste momento são armazenados como dados de posicionamento. |
Monitoramento de I/O*1 |
Verificação do status DESLIGADO/LIGADO dos sinais de I/O. |
Monitoramento em forma de onda*2 |
Verificação da velocidade de operação e dos sinais de E/S como uma forma de onda. |
*1 Pode ser realizada com o módulo de controle vendido separadamente (OPX-2A) ou com o software de configuração de dados (MEXE02) (veja as funções adicionais).
*2 Pode ser realizado com o software de configuração de dados (MEXE02) (veja as funções adicionais).
Funções estendidas
Funções estendidas
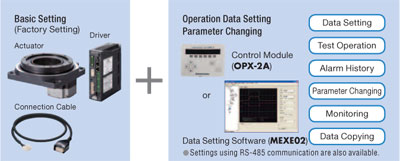
É possível combinar um módulo de controle (OPX-2A, vendido separadamente) ou o software* de configuração de dados (MEXE02) para alterar os parâmetros, adicionar funções e realizar várias operações de monitoramento, de acordo com as necessidades do seu sistema.
- Ajustes da configuração de parâmetros
- Monitoramento
- Operação de retorno
- Operação de compressão
*Cabo para conexão ao PC necessário para o software de configuração de dados MEXE02 (vendido separadamente** - consulte Acessórios).
**Um cabo de comunicação CCD05IF-USB GRATUITO está disponível por cliente, entre em contato com o suporte técnico para mais informações.
| Item | Overview | Configuraçãobásica | Configurações adicionais |
Seleção do modo de entrada de pulso |
Selecione o modo de entrada de pulso 1 ou 2 (lógica negativa). |
||
Além das configurações normais, a entrada de diferença de fase pode ser ajustada.- modo de entrada de pulso 1 (lógica positiva/negativa) - modo de entrada de pulso 2 (lógica positiva/negativa) - Entrada de diferença de fase (Fator de multiplicação 1, 2 ou 4) |
- | ||
Ajuste de resolução |
Seleção da resolução com os comutadores de função (D0, D1, CS0, CS1). |
||
Altera o valor da engrenagem eletrônica que corresponde a cada comutador de função (D0, D1, CS0, CS1). |
- | ||
Configuração da corrente de execução |
Altera a configuração da corrente de execução com o comutador de configuração de corrente (CORRENTE) |
||
Altera o valor que corresponde a cada uma das posições 0~F (16 níveis) para o comutador de configuração de corrente (CORRENTE) |
- | ||
Configuração da corrente de parada |
Configura a relação da corrente de parada em relação à corrente de execução. |
- | |
Configuração das coordenadas rotacionais do motor |
Configura as coordenadas rotacionais do motor. |
- | |
Sinal de ligação de todas as bobinas (Entrada C-ON) |
Sinal de entrada para a excitação do motor. |
||
Configura a lógica de entrada C-On para quando a alimentação é inserida. |
- | ||
Retorno à operação de posição de excitação durante a Ativação/Desativação da ligação de todas as bobinas |
Configura se haverá ou não o retorno à posição de excitação (posição de desvio 0) durante a ligação de todas as bobinas. |
- | |
Retorno à operação de posição de excitação |
Configuração de saída do código quando o alarme é disparado. |
- | |
Configuração do intervalo do sinal de saída de FINALIZAÇÃO |
Changes the END output signal range. |
- | |
Compensação do sinal de saída de FINALIZAÇÃO |
Offsets the END output signal value. |
- | |
Saída de fase A-/B- |
Use for motor position verification |
||
Sinal de saída de cronometragem |
Ele é inserido cada vez que o motor gira a 7,2° (0,4° para a mesa de saída) |
||
Configuração do filtro de velocidade |
Aplica um filtro ao comando de operação para controlar a ação do motor. |
||
Alteração do valor que corresponde a cada uma das posições 0~F (16 níveis) para o comutador de configuração. |
- | ||
Função de eliminação de vibração para o modo normal |
Ajuste para eliminar a vibração por ressonância durante a rotação. |
- | |
Ajuste para eliminar a vibração durante a aceleração, desaceleração e parada. |
- | ||
Ajuste de ganho para o modo de controle de corrente* |
Ajusta o ganho de posição e velocidade. |
- | |
Ajusta a constante de tempo de integração de velocidade. |
- | ||
Configura a frequência de vibração do controle de amortecimento. |
- | ||
Configura se haverá a ativação ou desativação do controle de amortecimento. |
- | ||
Seleção da posição de excitação do motor na ligação |
Configura se haverá a ativação ou desativação do controle de amortecimento. |
- | |
Configuração do módulo de controle |
Seleção do whether to use symbols oran absolute value display for the speed display of the control module. |
- | |
Ajuste para eliminar a vibração durante a aceleração, desaceleração e parada. |
- |
*Exceto para a redução adicional da geração de calor ou ruído, o uso do modo normal é recomendado.
Gateways de rede

O protocolo de comunicação do controlador mestre, rede Industrial, é convertido para o próprio protocolo de comunicação RS-485 da Oriental Motor. A conexão aos produtos compatíveis com a rede da Oriental Motor é completada com um cabo de comunicação RS-485.
- Redes Compatíveis:
CC-Link, MECHATROLINK-II, MECHATROLINK-III, EtherCat
*Para uso com o tipo de dados armazenados (Rede)
![]()
![]()
![]()
SCX11 Driver Universal de Eixo Simples

O SCX11 é um controlador altamente funcional e sofisticado, equipado com funções de edição e execução de programas. Use o SCX11 como um controlador que armazena programa para se conectar a qualquer um dos drivers de entrada de impulso padrão da Oriental Motor. O SCX11 também é capaz de controlar o motor através de comunicações seriais como USB, RS-232C e CANopen.
* Para uso com o driver de tipo de entrada de pulso.
Cabo de Comunicação RS-485

Esses cabos são usados para ligar os drivers quando um tipo de controlador acoplado estiver sendo operado em um modo de quedas múltiplas.
*Para uso com o tipo de dados armazenados (Rede)
Item |
Comprimento |
Produtos Aplicáveis |
0.33 ft. (100 mm) |
Entrada CC |
|
0.82 ft. (250 mm) |
Entrada CC |
Conjunto de Baterias

É possível desenvolver um sistema absoluto que detecta posições absolutas ao conectar a bateria como acessório (vendida separadamente).
*Para uso com o tipo de dados armazenados (Rede)
Opções de controle - Software de configuração de dados

Este cabo de comunicação é necessário para conectar-se ao computador no qual o software de configuração de dados está instalado.
Cabos

Estes cabos são utilizados para ligar ou prolongar a distância entre o motor eo condutor.
Obrigatório (vendido separadamente).
Utilize um cabo de motor flexível se o motor estiver instalado numa peça móvel ou se o cabo for flexionado.
Pedestal de instalação

Trata-se de um pedestal de instalação que permite que a série DGII seja usada como um motor de acionamento direto. Aplicações que exigem altura e instalação lateral também podem ser realizadas, ampliando o limite de operações disponíveis.
Conjunto do sensor de posição inicial

Um conjunto do sensor de posição inicial, constituído de um sensor de fotomicrografia, conector com cabo, suporte de montagem do sensor, placa de proteção e parafusos de montagem, é fornecido para facilitar o retorno simples para a operação de posição inicial.
Disponível em saída de sensor NPN ou PNP.
Item |
Saída dosensor |
Produtoaplicável |
NPN |
DG60 |
|
PNP |
||
NPN |
DG85 |
|
PNP |
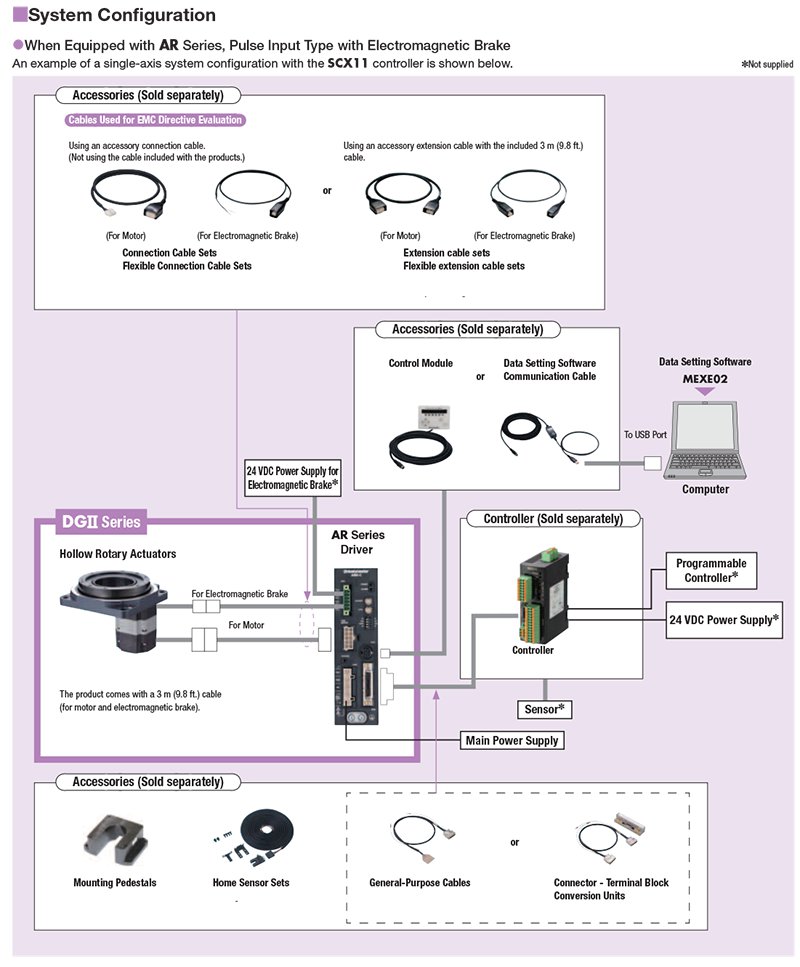
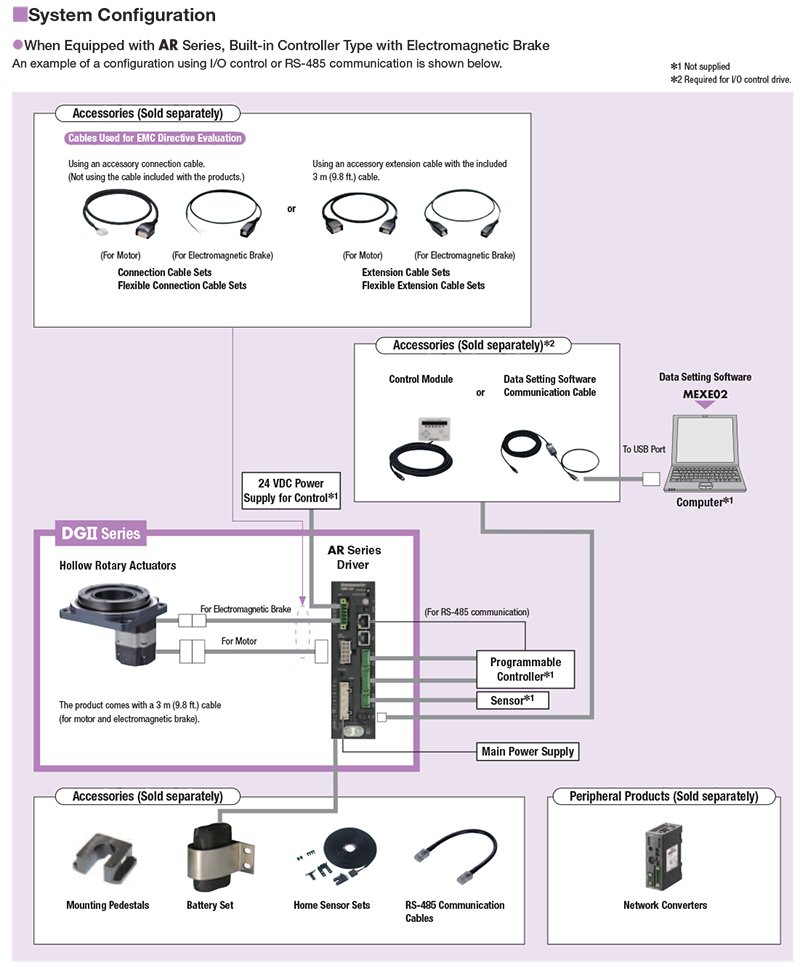
Configuração do Sistema